透视光影的边界:从第一性原理深度解析焦深与景深
在光学成像的世界里,“清晰”从来不是一个绝对的二元概念,而是一个关于“容忍度”的连续函数。当我们凝视一张照片或通过显微镜观察细胞时,我们所感知的清晰范围,实际上是光学系统对误差的某种妥协。
这种妥协在物方空间(Object Space)表现为景深(Depth of Field, DOF),而在像方空间(Image Space)则表现为焦深(Depth of Focus, DoFocus)。尽管这两个术语在日常摄影中常被混淆,但在光学工程、机器视觉以及半导体光刻领域,严格区分二者是理解成像系统极限的关键。
本文将摒弃经验法则,回归几何光学,通过数学推导揭示这两个概念的本质联系。

1. 定义:清晰度的物理边界
要讨论焦深和景深,首先必须引入一个核心概念:允许弥散圆(Circle of Confusion, CoC)。
在理想的高斯光学(Gaussian Optics)中,一个点光源应当汇聚成一个几何点。然而,受限于光的衍射极限(Diffraction Limit)和像差,以及成像介质(胶片颗粒或CCD/CMOS像素)的分辨率限制,真正的“点”是不存在的。
当一个光斑的直径小于人眼或传感器的分辨极限时,我们主观上认为它是“清晰”的。这个临界直径,就是允许弥散圆直径,通常记为 $c$。
1.1 焦深 (Depth of Focus)
焦深是指在保持物距不变的情况下,像平面(如胶片或传感器)沿光轴前后移动,而像点模糊程度仍保持在允许弥散圆内的移动范围。
- 物理本质:像方空间的轴向容差。
- 关键场景:相机装配精度、显微镜调焦、光刻机硅片平整度要求。
1.2 景深 (Depth of Field)
景深是指在像平面(焦平面)位置固定的前提下,被摄物体在沿光轴方向前后移动时,其在像平面上成的像仍能保持清晰的距离范围。
- 物理本质:物方空间的轴向容差。
- 关键场景:人像摄影(虚化背景)、风景摄影(超焦距)、机器视觉检测。
2. 焦深和景深的推导
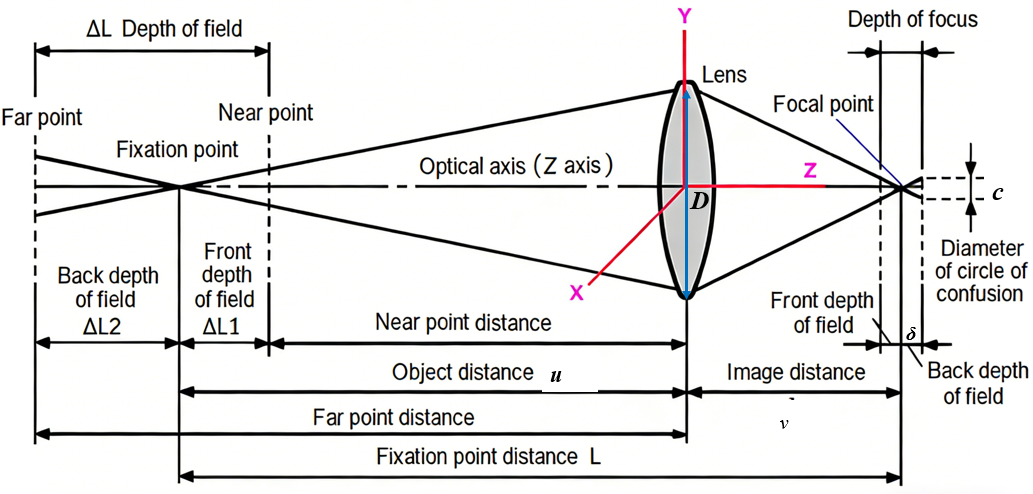
2.1 基础定义与符号系统
在开始推导前,必须建立严格的符号系统(遵循高斯光学符号惯例):
- $f$:镜头焦距。
- $D$:入瞳直径(光圈孔径)。
- $N$:光圈数(F-Number),定义为 $N = f/D$。
- $c$:允许弥散圆直径(Circle of Confusion, CoC)。
- $u$:对焦平面的物距(Object Distance)。
- $v$:对焦平面的像距(Image Distance)。
- $m$:横向放大率(Magnification),$m = v/u$。
2.2 焦深 (Depth of Focus) 的严格推导
焦深描述的是像方空间的容差。假设像平面从理想焦平面移动了距离 $\delta$,使得原本汇聚成一点的光锥在像平面上形成了一个直径为 $c$ 的光斑。
2.2.1 几何构建
光线从透镜后方射出,形成一个底面直径为 $D$(出瞳直径,在此简化为等于入瞳直径),高为 $v$ 的圆锥体。
当像平面移动 $\delta$ 距离时,根据相似三角形原理(Thales Theorem):
$$
\frac{c}{\delta} = \frac{D}{v}
$$
2.2.2 严格推导 (Exact Derivation)
从上述几何关系,我们可以直接解出单侧焦深 $\delta$:
$$
\delta = \frac{c \cdot v}{D}
$$
利用光圈数定义 $D = f/N$,代入上式:
$$
\delta = \frac{c \cdot v \cdot N}{f}
$$
引入放大率公式 $m = v/u$,结合高斯成像公式 $1/u + 1/v = 1/f$,我们可以推导出 $v = f(1+m)$。将其代入 $\delta$ 的表达式:
$$
\delta = \frac{c \cdot f(1+m) \cdot N}{f} = N \cdot c \cdot (1 + m)
$$
因此,严格的总焦深 $t$(包含前后两侧)为:
$$
t_{\text{exact}} = 2 \cdot \delta = 2 \cdot N \cdot c \cdot (1 + m)
$$
物理意义:此公式表明,焦深不仅取决于光圈 $N$ 和弥散圆 $c$,还与放大率 $m$ 线性相关。在微距摄影($m$ 较大)中,焦深会显著增加。
2.2.3 近似推导 (Approximation)
在普通摄影场景中,物距通常远大于焦距($u \gg f$),此时放大率 $m = v/u \approx 0$。像距 $v$ 无限接近于焦距 $f$。
忽略 $m$ 项,我们得到工程上最常用的近似公式:
$$
t_{\text{approx}} = 2 \cdot N \cdot c
$$
2.3 景深 (Depth of Field) 的严格推导
景深的推导涉及物象共轭关系的非线性变换,比焦深复杂得多。
2.3.1 几何构建与前置条件
设对焦在距离 $u$ 处,此时像距为 $v$。
- 近景深界限 $u_n$:物体移近到 $u_n$,其像点退后到 $v + \delta$,在原像平面 $v$ 处形成直径为 $c$ 的弥散圆。
- 远景深界限 $u_f$:物体移远到 $u_f$,其像点前移到 $v - \delta$,在原像平面 $v$ 处形成直径为 $c$ 的弥散圆。
根据像方几何关系(参考焦深推导),允许的像距偏移量 $\delta$ 为:
$$
\delta = \frac{c \cdot v}{D}
$$
2.3.2 严格推导 (Exact Derivation)
我们需要求解满足像距为 $v’ = v + \delta$ 的物距 $u_n$。根据高斯公式:
$$
u_n = \frac{f \cdot v’}{v’ - f} = \frac{f(v + \delta)}{v + \delta - f}
$$
将 $\delta = cv/D$ 代入:
$$
u_n = \frac{f(v + \frac{cv}{D})}{v + \frac{cv}{D} - f}
$$
这是一个极其繁琐的代数式。为了简化,我们引入超焦距 $H$ 的严格定义。
当对焦在无穷远时,$v=f$,此时像平面上的模糊斑直径由 $D$ 和 $f$ 决定。令无穷远物体的像斑刚好为 $c$,对应的最近清晰距离为 $H$。
严格的超焦距公式为:
$$
H = \frac{f^2}{N \cdot c} + f
$$
(注:绝大多数教材忽略末尾的 $+f$,但在严格推导中我们将保留它或在最后一步省略)
经过繁琐的代数变换(利用 $1/u + 1/v = 1/f$ 消除 $v$),我们可以得到严格的景深界限公式:
$$
u_n = \frac{u \cdot H_{\text{approx}}}{H_{\text{approx}} + (u - f)}
$$
$$
u_f = \frac{u \cdot H_{\text{approx}}}{H_{\text{approx}} - (u - f)}
$$
其中 $H_{\text{approx}} = f^2 / (Nc)$。
严格的总景深 $\Delta L$:
$$
\Delta L_{\text{exact}} = u_f - u_n = \frac{2 u (u-f) H_{\text{approx}}}{H_{\text{approx}}^2 - (u-f)^2}
$$
将 $H_{\text{approx}}$ 展开,得到完全展开式:
$$
\Delta L_{\text{exact}} = \frac{2 \cdot u \cdot (u-f) \cdot f^2 \cdot N \cdot c}{f^4 - (u-f)^2 \cdot N^2 \cdot c^2}
$$
2.3.3 近似推导 (Approximation)
上述公式在工程应用中过于复杂。我们进行三级近似:
近似条件 1:$u \gg f$(非微距摄影)。
此时 $(u-f) \approx u$。
近似条件 2:$H \gg u$(对焦距离远小于超焦距)。
这意味着分母中 $H^2$ 远大于 $(u-f)^2$,可以忽略减数项。
基于这两个条件,公式简化为:
$$
\Delta L \approx \frac{2 u \cdot u \cdot H}{H^2} = \frac{2 u^2}{H}
$$
代入 $H \approx f^2 / (Nc)$:
$$
\Delta L_{\text{approx}} = \frac{2 u^2 N c}{f^2}
$$
这就是我们在摄影教材中见到的经典公式。
2.4 总结与对比表
为了清晰展示严格解与近似解的区别,我们将其总结如下:
| 参数 | 严格公式 (Exact Formula) | 近似公式 (Approximation) | 适用条件 |
|---|---|---|---|
| 焦深 (DoFocus) | $$t = 2Nc(1+m)$$ | $$t = 2Nc$$ | 普通摄影 ($m \approx 0$) |
| 超焦距 ($H$) | $$H = \frac{f^2}{Nc} + f$$ | $$H = \frac{f^2}{Nc}$$ | 长焦或大光圈 ($f^2/Nc \gg f$) |
| 近景深 ($u_n$) | $$\frac{u H}{H + (u-f)}$$ | $$\frac{u H}{H + u}$$ | 物距远大于焦距 ($u \gg f$) |
| 远景深 ($u_f$) | $$\frac{u H}{H - (u-f)}$$ | $$\frac{u H}{H - u}$$ | 物距远大于焦距 ($u \gg f$) |
| 总景深 (DoF) | $$\frac{2 u (u-f) H}{H^2 - (u-f)^2}$$ | $$\frac{2 u^2 N c}{f^2}$$ | $u \gg f$ 且 $u \ll H$ |
2.5 什么时候必须使用严格公式?
- 微距摄影 (Macro Photography):当放大率 $m > 0.1$ 时,近似公式误差呈指数级上升。此时焦深必须考虑 $(1+m)$ 项,否则会导致对焦行程估算严重不足。
- 显微镜设计:在显微光学中,$m \gg 1$,此时近似公式完全失效。
- 大画幅相机:由于焦距 $f$ 较长,且经常使用小光圈,严格计算超焦距中的 $+f$ 项有时也是必要的修正。
2.6焦深与景深影响因素
在光学工程与摄影实践中,区分“物方空间”与“像方空间”的容差至关重要。下表总结了核心参数变化时,景深与焦深的响应差异。
| 影响因素 (Factor) | 变化方向 (Change) | 对景深 (DOF) 的影响 (物方空间) |
对焦深 (DoFocus) 的影响 (像方空间) |
物理原理 / 公式依赖 |
|---|---|---|---|---|
| 光圈系数 ($N$) (F-Number) |
变大 ($F2.8 \to F11$) (光圈孔径变小) |
变深 (Deep) 范围显著扩大 |
变深 (Deep) 焦平面容差变大 |
两者均与 $N$ 成正比。 光束锥角变小,弥散斑扩散变慢。 |
| 镜头焦距 ($f$) (Focal Length) |
变长 ($24mm \to 200mm$) (长焦镜头) |
变浅 (Shallow) 背景虚化强烈 |
基本不变 (普通摄影距离下) |
DOF $\propto 1/f^2$ (平方反比)。 焦深主要取决于光圈和 $c$,与焦距无直接关系。 |
| 拍摄距离 ($u$) (Subject Distance) |
变远 ($0.5m \to 50m$) (远离物体) |
变深 (Deep) 且增长极快 |
基本不变 (除非进入微距领域) |
DOF $\propto u^2$ (平方正比)。 焦深主要受放大率 $m$ 影响,远距离时 $m \to 0$,焦深恒定。 |
| 允许弥散圆 ($c$) (CoC / Pixel Size) |
变大 (低像素或小画幅) |
变深 (Deep) 看起来更清晰 |
变深 (Deep) 装配精度要求降低 |
两者均与 $c$ 成线性正比。 判定“清晰”的标准越宽松,深度越大。 |
| 放大率 ($m$) (Magnification) |
变大 (微距摄影) |
极浅 (Very Shallow) 毫米级景深 |
变深 (Deep) 显著增加 |
互为倒数关系 (近似)。 焦深 $\approx m^2 \times$ 景深。 |
3. 焦深与景深的关系:纵向放大率
物理学的美妙之处在于对称性。焦深和景深实际上是共轭关系,通过纵向放大率(Longitudinal Magnification) 联系在一起。
如果你熟悉微分,我们可以对高斯公式 $\frac{1}{u} + \frac{1}{v} = \frac{1}{f}$ 进行微分:
$$
-\frac{du}{u^2} - \frac{dv}{v^2} = 0 \implies dv = - \left( \frac{v}{u} \right)^2 du
$$
其中:
- $dv$ 对应焦深(像平面位置变化)。
- $du$ 对应景深(物平面位置变化)。
- $m = v/u$ 是横向放大率(Lateral Magnification)。
因此,我们得到一个极其优雅的近似关系:
$$
\text{焦深} \approx m^2 \times \text{景深}
$$
或者:
$$
\text{景深} \approx \frac{\text{焦深}}{m^2}
$$
深度解析
- 普通摄影 ($m \ll 1$):物体很大,像很小。$m^2$ 极小。因此,景深很大,焦深很小。这意味着拍摄时我们可以容忍物体前后移动一点,但胶片/传感器必须非常精确地放置在焦平面上。
- 显微摄影 ($m \gg 1$):物体很小,像很大。$m^2$ 极大。因此,景深极小,焦深很大。这意味着显微镜调节旋钮需要极其微小的移动才能对上焦,但像平面(目镜或相机)的位置反而没那么敏感。
4. 实际生活中景深和焦深影响的案例
4.1 景深案例:电影感与叙事
在电影《肖申克的救赎》中,导演经常使用浅景深将主角从背景杂乱的监狱环境中剥离出来,这种**视觉隔离(Visual Isolation)**引导观众只关注角色的表情。
- 技术实现:使用85mm或更大焦距的镜头,配合T1.4的大光圈。
- 对立面:新闻纪实摄影通常使用F8或F11的小光圈(超焦距技术),确保前景的突发事件和背景的环境信息都清晰,以交代完整的“故事上下文”。
4.2 焦深案例:光刻机 (Lithography)
这是焦深概念最昂贵的应用场景。在制造7nm或3nm芯片时,光刻机需要将纳米级的电路图案投影到硅片上。
- 挑战:极高的数值孔径(NA)导致焦深(DoFocus)极浅,往往只有几十纳米。
- 后果:如果硅片表面有微小的起伏,或者平整度不够,电路图就会模糊,导致芯片报废。
- 解决方案:CMP(化学机械抛光)工艺必须将晶圆表面打磨到原子级的平整,以适应极浅的焦深。
4.3 工业视觉:远心镜头 (Telecentric Lens)
在精密工业测量中,普通镜头的景深会带来透视误差(近大远小)。
- 应用:使用双远心镜头,不仅消除了透视误差,还通过特殊的光阑设计,在一定景深范围内保持放大倍率恒定,确保机器视觉算法测量螺丝尺寸时,不会因为传送带的轻微震动(物距变化)而得出错误数据。
5. 焦深与景深的计算 Code
为了彻底打破抽象公式的壁垒,我们编写了一套 Python 代码,不仅可以量化分析参数的影响,还能“画”出几何光学的核心原理图。
这段代码将生成两张关键图像:
- 参数敏感度面板:一目了然地看到光圈、焦距如何非线性地改变景深。
- 光路原理示意图:直观展示光线如何汇聚,以及“允许弥散圆”是如何定义焦深边界的。
1 | |
图表一:参数敏感度分析
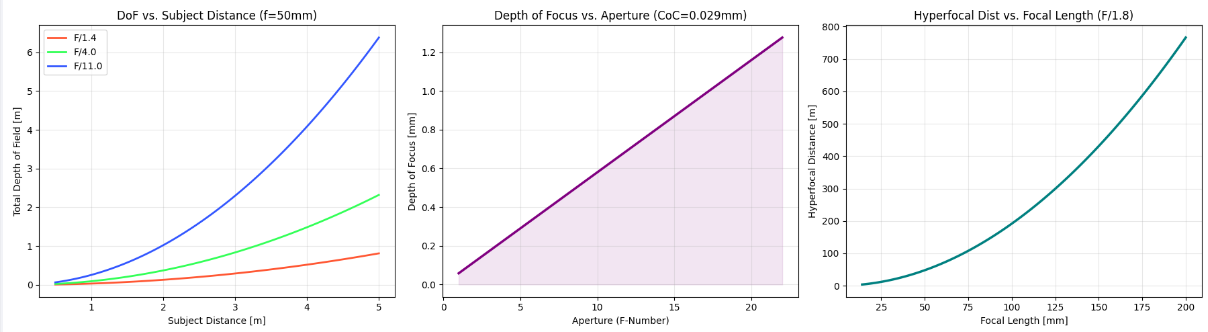
- 左图 (DoF vs Distance):这是最经典的“抛物线”增长。你会发现,F11 的增长速度远快于 F1.4。这解释了为什么“退后两步”是获得大景深最廉价的方法。
- 中图 (DoFocus vs Aperture):展示了极其完美的线性关系。光圈数值翻倍(光孔变小),焦深严格翻倍。这对于工业检测极其重要:如果你的零件在传送带上抖动幅度为 0.1mm,你只需要查表就能算出需要缩到多少光圈才能保证清晰。
- 右图 (Hyperfocal vs Focal Length):展示了指数级的增长。焦距增加一倍,超焦距会增加四倍($H \propto f^2$)。这就是为什么长焦镜头极难获得全景深,而广角镜头随手一拍都是清楚的。
图表二:几何光路原理 (Schematic)
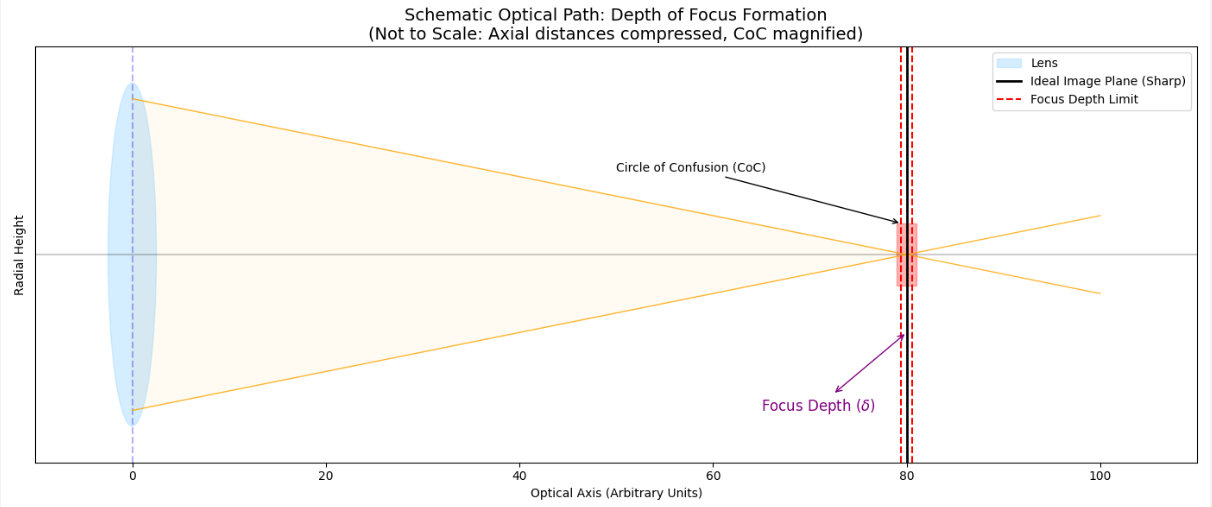
这张图是理解“模糊”本质的关键:
- 橙色锥体:代表光束。光圈越大,锥体底座(透镜处)越宽,锥角越大。
- 黑色实线 (Ideal Image Plane):这是光线汇聚成完美一点的位置。
- 红色虚线 (Limits):这是光斑扩散到允许弥散圆 (CoC) 大小的位置。
- 焦深 ($\delta$):两根红色虚线之间的距离。
直观结论:如果光圈变小(透镜变窄),橙色光锥会变得更“细长”。这意味着光线在汇聚点前后的扩散速度变慢了,红色虚线就可以推得更远——这就是缩光圈增加焦深/景深的几何本质。
结语
从光的衍射到数学的近似,焦深与景深不仅仅是摄影师手中的工具,更是连接物理光学与现实世界的桥梁。理解它们,实际上是在理解光学系统传递信息的容量与限制。无论是捕捉瞬间的艺术,还是制造纳米芯片的工艺,我们都在这“清晰与模糊”的边缘上起舞。
希望通过本文的原理推导,能让你在下一次按下快门,或设计光路时,拥有更深刻的直觉。